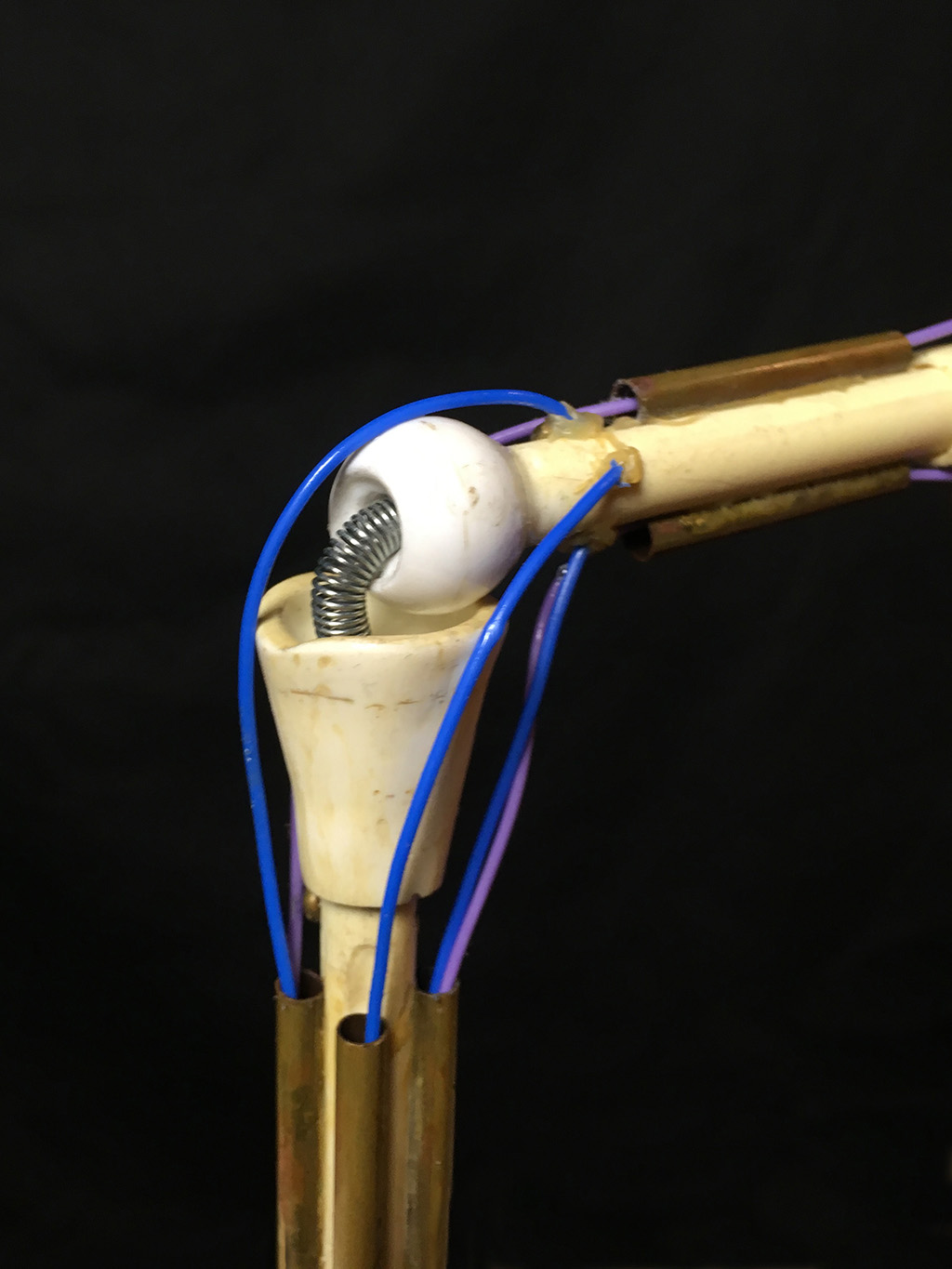
I created this little robot appendage as a preliminary foray into tendons and bones. I am generally interested in how to make robot movements more fluid and graceful, and thought this would be a good place to start. (I got the ball from my organic chemistry set, and cast all the other pieces out of polyurethane.)