The Hammerhead Stereoscope is a hardware/software solution that would provide more accurate measurements of animals at a distance. The idea is to use two cameras spaced apart on a rigid tube, import 4K video into a custom software package, select corresponding points from the Left and Right images, and calculate a distance measurement and an error. This is basic stereo-vision, but the idea is to create field-ready hardware and an easy-to-use software interface so that conservation biologists and ecologists can practically use this technology.
Let’s say you have two points, A and B.
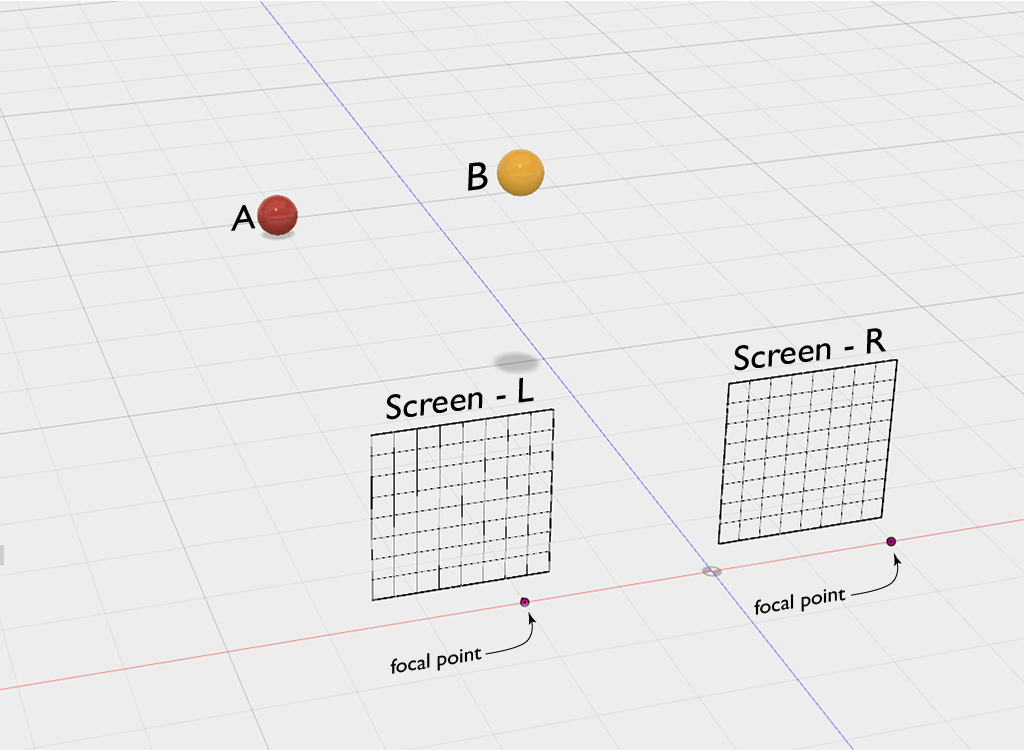
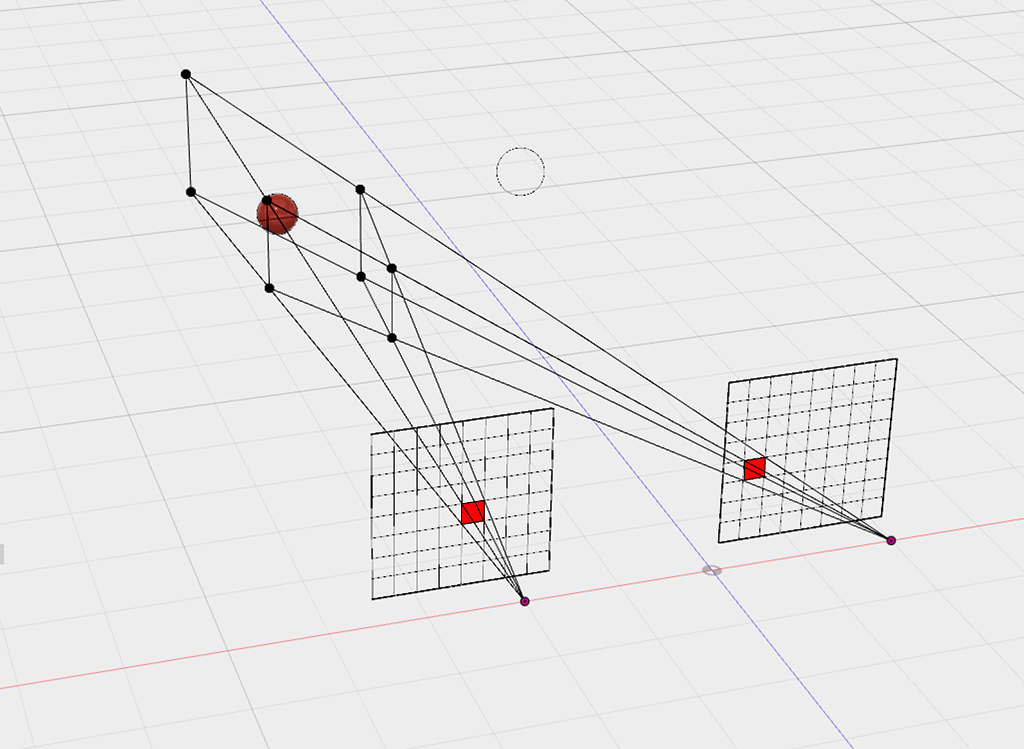
Select the pixels on the left and right screens where A appears.
Select the pixels on the left and right screens where B appears.
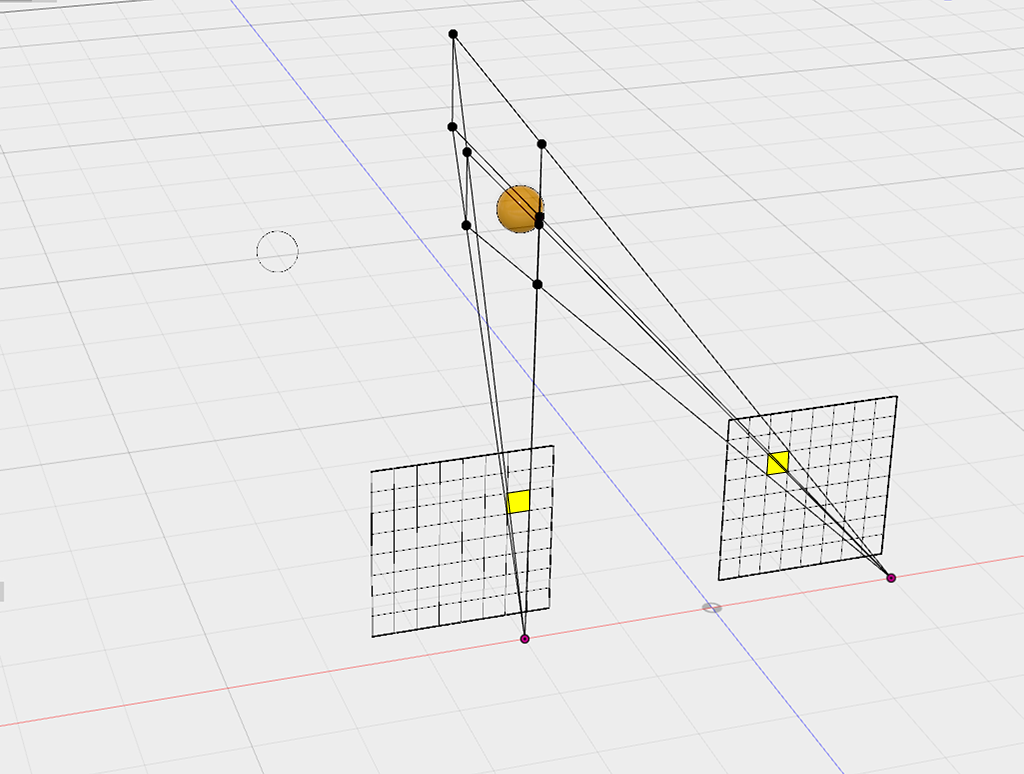
Now we know that the position of the two points are within these boundaries. The further away the target is, (and the closer together the cameras are), the more elongated these shapes become, and the greater the uncertainty.

We only know that the points are somewhere within these zones, but not precisely where, so we need to define this uncertainty. If somebody wants to help me come up with an algorithm for the crazy integral that represents this, that would be awesome!
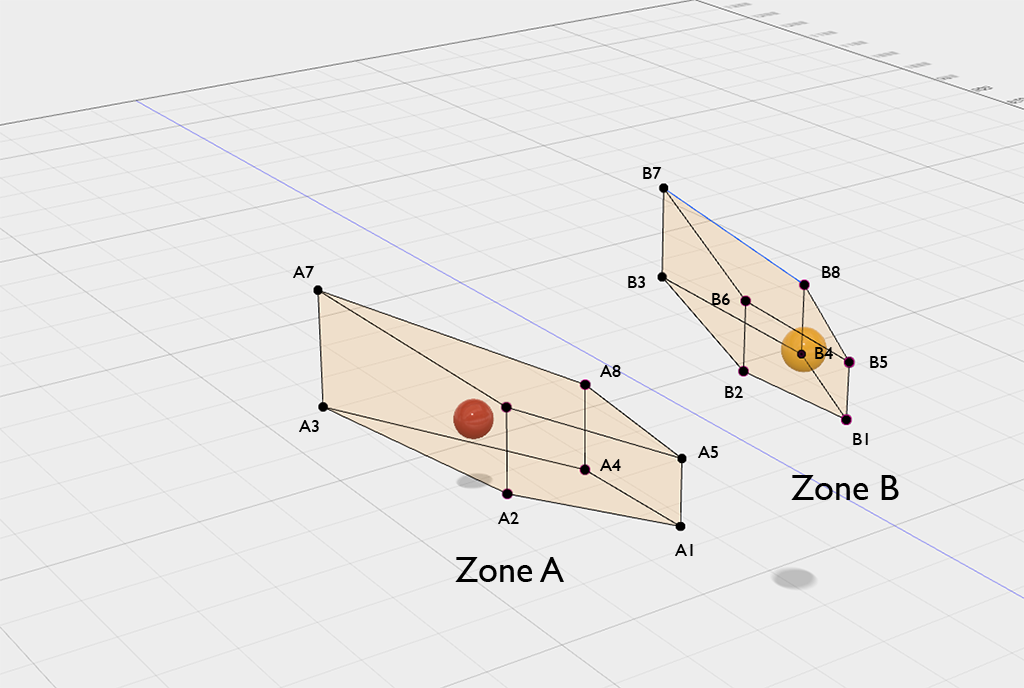
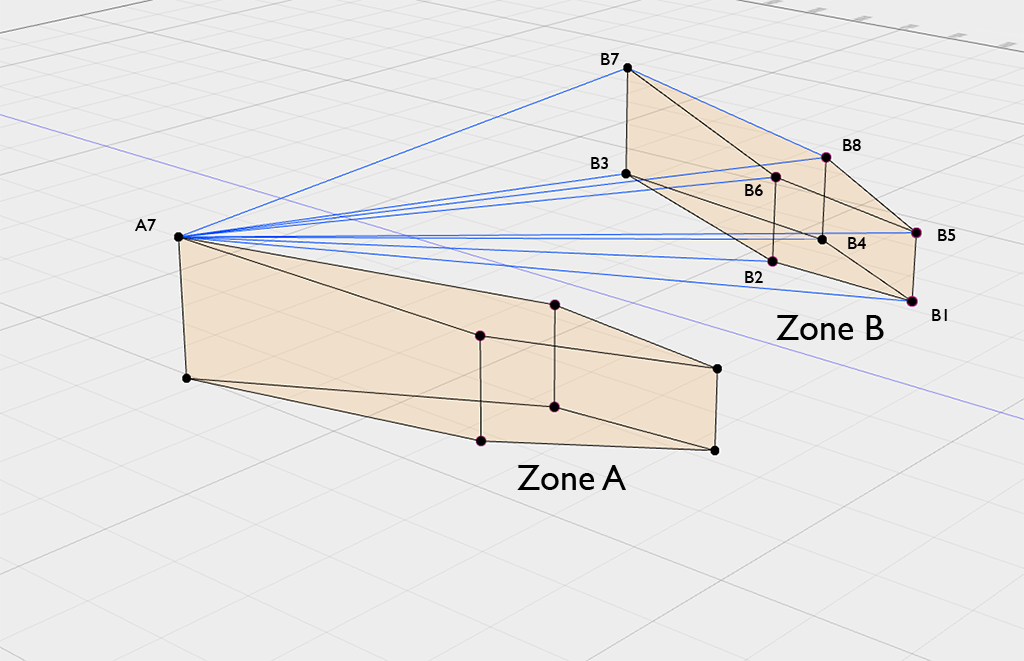
Meanwhile, I am going to get pretty close by using this brute force method: Calculate the distances between all the possible combinations of two points between the zones. (8 x 8 = 64 measurements). Since the points are at the tips of the zone boundary shapes this will give us all the extremes. Our result will be a minimum, maximum and average of these 64 measurements. Here is all 8 measurements from point A7 for example.
Here is a preliminary mock-up of the interface.
